
这个机器人堪称现代版“木牛流马”
不仅能自如行走
还可背负重物翻山越岭
灾区物资运输
军队野外负载
都是它的未来舞台
它就是由交大学生研发的
涡喷驱动足式被动行走平台!
近日,第十七届“挑战杯”全国大学生课外学术科技作品竞赛(以下简称挑战杯)终审决赛落下帷幕,由我校机电学院刘超、姚燕安、李洪萌3位老师指导,徐然、翁乐安、王天浩、郝子越、赵阿元5名学生参与完成的“涡喷驱动足式被动行走平台”项目获“黑科技”专项赛道全国一等奖!
2020年暑假,一份对机械相同的热爱将他们5个不同年级的学生凝聚在一起,在近400天的时间里,他们团结协作、并肩作战,在老师的指导下解决一个又一个的技术难题,将课堂上的理论知识逐渐转化为赛场上能走能跑的机器人。“知者行之始,行者知之成”,年轻的他们正努力以科研之力,为祖国实现现代化的伟大事业添砖加瓦。

“黑科技”是什么?
寻找那些或围绕“卡脖子”问题、或针对前沿领域、或具有高精尖色彩、或会改变人们生产生活方式的,对现有科技成果具有一定颠覆性、超越性的,让人感觉出人意料、震撼震惊的,具有前瞻性、创新性、应用性(或应用前景)的实物或者技术!
下面请跟着通通一起来解密这项“黑科技”!
什么是“涡喷驱动足式被动行走平台”?

涡喷驱动足式被动行走平台是一种多足机器人,它将闭链腿式机构与被动行走原理有机结合,采用涡轮喷气发动机提供驱动动力。它可在极端地形环境下移动,具有行驶速度快、负载能力强、机械能效高、续航时间长的优点,为野外物资运输任务提供了快速、高效的平台,可应用于野外行军、灾区物资补给、偏远地区运输等场景。

“它”有哪些创新点?
闭链腿组被动行走
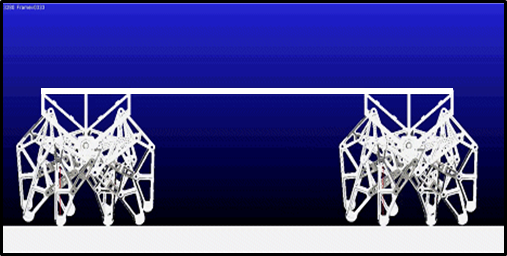
该团队设计了一种多组联动的方案,解决因机构原动件不同而导致的传动角问题,使得每组支腿仅在合适的区间进行的工作,提高传动角以及行走的平稳性。他们通过Adams进行动力学仿真,分别讨论六足联动、八足联动时机构的运行情况。通过仿真结果,他们发现:八足联动方案行走更加平稳,可充分发挥被动行走的优势。
涡喷提供等效重力
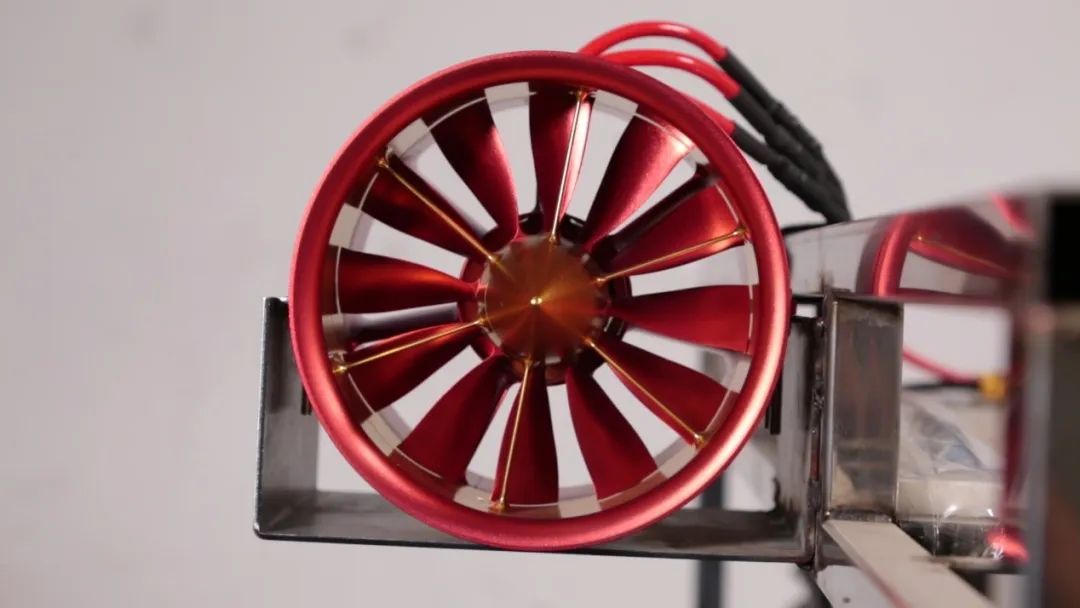
由于传统被动行走只能在下坡进行,不具有普遍实用性。为此,该团队提出利用双涡喷发动机产生等效重力的方案,弥补了非下坡路段的能耗。与传统的驱动机相比,涡喷发动机能够提供线性推力而非曲杆转矩,其功率输出也不受地形因素的影响,且在高速情况下能耗较低。
可调节闭链腿机构
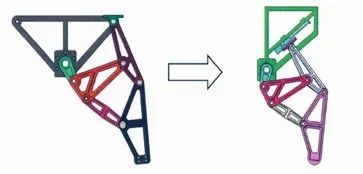
虽然闭链腿组具有运行平稳、负载能力强的优点,但由于阻断轨迹曲线过低,越障性能不足,难以适应非结构化路面。为此,该团队设计了一种可调整的腿组机构,其利用一个额外的电机使得平台可以在高速模式与越障模式间自由切换。在这种腿组的作用下,平台的极限越障高度大大提升,满足了在非结构化路面行走的要求。
“它”为什么是一项“黑科技”?
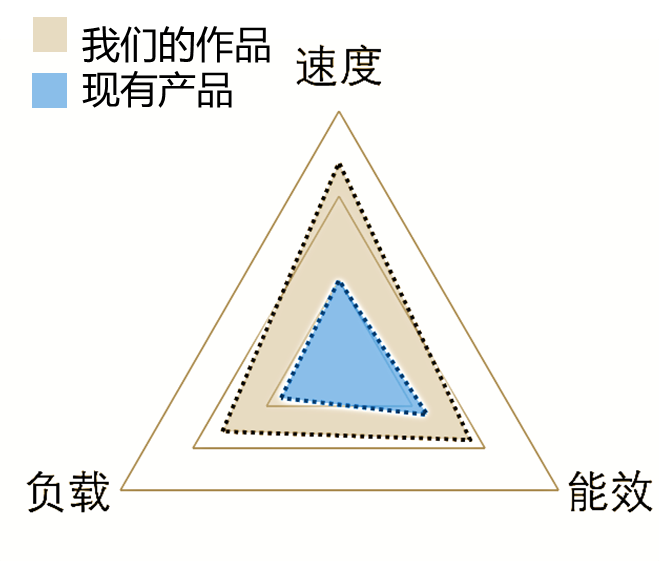
与现有的同类产品相比,“涡喷驱动足式被动行走平台”在速度性能、负载性能、能耗性能上均有显著优势。
“它”将从交大出发,走向哪里?
01
军用转化
目前“涡喷驱动足式被动行走平台”已受军方关注并开展合作,现正在讨论有关应用场景的问题,预计将在协助士兵负载、遥控火力支援、战术爆破突袭等方面得以应用。
02
民用转化
“涡喷驱动足式被动行走平台”也可应用于民间领域,创造社会效益以及经济效益。根据产品特性,预计其可在灾区物资支援、地质科学考察、山区物流运输等方面得到较好应用。
赛场上闪光的背后
是交大人对“知行”校训的行动体现
源于课堂灵感
聚焦“卡脖子”技术
服务国家战略社会需求
多足机器人将走出实验室
承载着党和人民的真切需要
以更快的速度奔赴到需要它的地方


